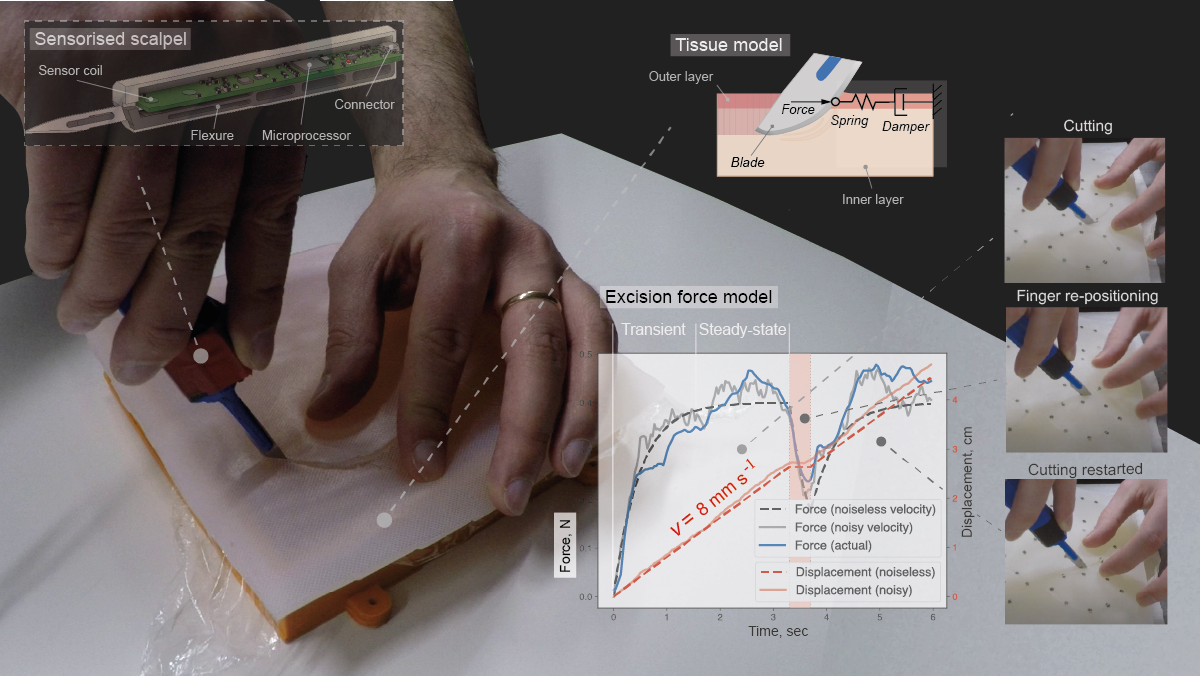
A. Straižys, M. Burke, P.M. Brennan, S. Ramamoorthy - Communications Engineering Vol. 2, 2023
C. Innes, S. Ramamoorthy - RSS-20
A. Straizys, M. Burke, S. Ramamoorthy - ICRA-20
Y. Hristov, D. Angelov, A.Lascarides, M. Burke, S. Ramamoorthy - CORL-19
M. Burke, S. Penkov, S. Ramamoorthy - RSS-19
Robust Autonomy and Decisions Group
We investigate learning, adaptation and control mechanisms to enable autonomous robots to cope with the uncertain and the unknown. Our research focus areas include:
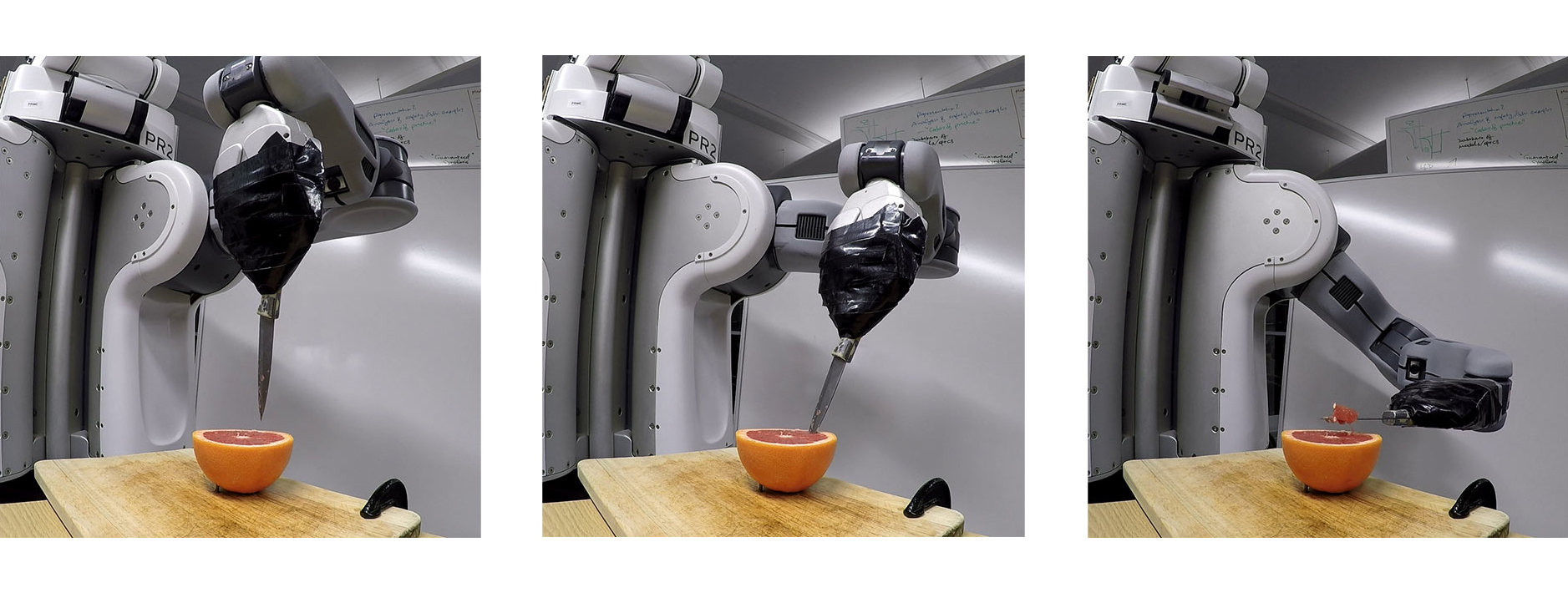
- Dexterous manipulation skills: understanding what humans/animals do, in order to achieve similar robotic skills
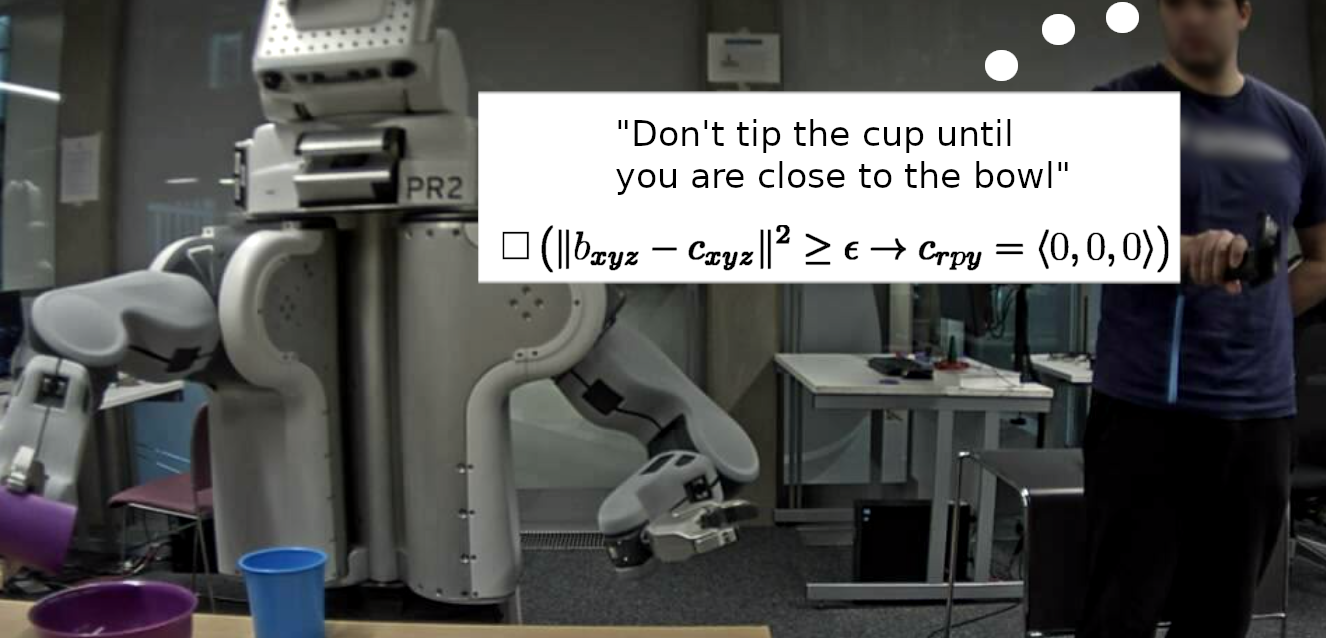
- Human-robot interaction, including paradigms such as machine teaching
- Active sensing and incremental, compositional model learning
- Physics-informed machine learning, including geometric/topological representations and multi-scale modelling
- Safety and trustworthiness of autonomous systems
We develop techniques that are relevant to a broad range of applications, ranging from advanced manufacturing to mobility and field robotics. An application domain of particular current interest is healthcare technologies, including biomedical devices and biophysical discovery platforms.